
This project is a conversion of a full-sized tractor to run under RC control. This all started because I thought it would be a fun and interesting project. But, there are some things that make the outcome useful. For example, if you don't care to be sitting on the tractor when on a steep slope. Or inching it around when attaching implements without getting on and off the seat a bunch of times. Or maybe you get stuck, and are pulling yourself out with another piece of machinery, and need to have the wheels turning as you pull. Maybe you are doing some spraying with a long hose, and you want to move the tractor along with you without curling up the hose and getting back on the tractor.

This conversion was done on my John Deere 4210 tractor, which has eHydro (hydrostatic drive) and power steering. Both those helped keep the project manageable. For example, I didn't need to worry about controlling the throttle since hydrostatic lets you control speed with a constant throttle setting. So the task consists of running the fore/aft direction and speed, and the steering.
Here's a short video of it in action:
On most of the projects that you read about on this website, I put mechanical drawings, schematics, a lot of detail. However, I'm a little concerned that someone will use this information to do their own tractor, kill themself or somebody else, then I'll see a lawyer at the door. So I'm keeping some of the "secret sauce" to myself, but presenting the general scope of the project.
I used a standard RC controller from Futaba which is normally used for RC cars. This is a reliable, low cost (about $70 with receiver) unit that uses FHSS technology. At the tractor end, that means all I have to deal with is decoding the PWM signals and converting them to outputs tailored to this job. The range is about 500 feet presumably.
The foot pedals on these tractors operate potentiometers that feed the signal back to the ECU. So I deisgned an electronic circuit that intervenes with these signal wires and emulates the same signal back to the ECU. Only four wires were necessary to splice into for this function: power, ground, and the fore/aft electronic signal wires.

By installing a connector to these wires, the electronics module plugs right in to provide it's functions. The electronics module that I designed reads the input signal from the transmitter and converts it to usable signals via a microprocessor and some analog circuitry. Unless the RC Controller is on and sending a signal to move, it's completely out of the circuit. It also decodes the steering signals and sends them to another box up by the steering for receipt by it's microprocessor.
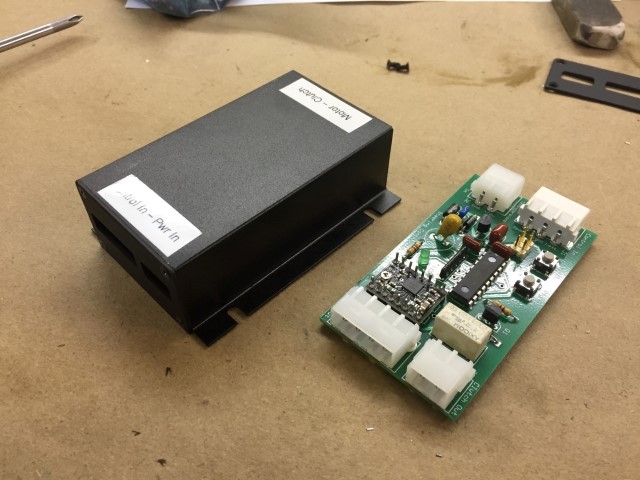
Here's the eHydro control box with innards exposed. Unlike normal RC practice, I designed it so that the RC receiver plugs right into the circuit board. That eliminates cables, makes it smaller, and even allows for some components to be mounted below it. This is it with the RC receiver unplugged...

The steering on these tractors is done by hydraulics. No physical connection between the steering wheel and the front wheels. So the task is to motorize the steering wheel with the complication is that the motor needs to be disconnected from the steering wheel when steering is to be done manually.
As a first offering, I found a used 12V dc motor with electric clutch on eBay. I believe it was designed to be used on a conveyor system. Turns out that the motor turned way too slow, but the clutch could be re-purposed. Later, I found that these clutches cost about $200, so the combo I bought on eBay for $35 was a great find. When 12v is applied to the clutch, it locks together, otherwise it free-wheels.
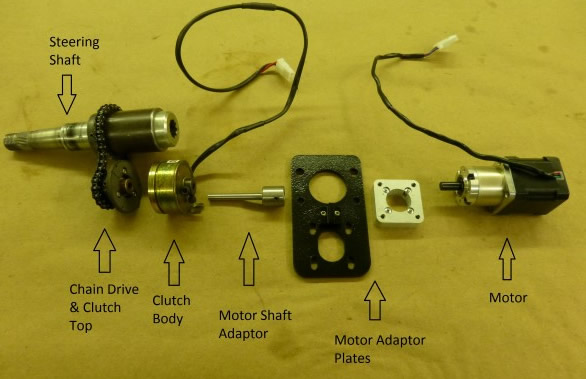
Next, I found a stepper motor with gear reduction that looked like it might fit in there and be about the right speed. So I made adaptors to make the clutch fit on the shaft of the motor, and to mount the motor onto the tractor. I used sprockets and #25 chain to couple the motor to the steering shaft. Here's an overview of the parts used in the steering...
In order to make space for the motor, I had to give up the tilt-steering function. I didn't mind doing that, I've never adjusted it in the 15 or so years I've had the tractor. I made a sleeve that was a press-fit to go over the part of the shaft with a U-joint to make it a solid shaft.

The steering control box that I designed is pretty simple, thanks to the use of the microprocessor and a stepper motor electronics driver module. I made it to fit into a stout metal box for protection, both physically and electrically.
So, how does all this go together? Here's a picture of it installed in the tractor. The drive assembly is mounted in slotted holes to allow the chain to be tensioned properly.

It fits under the instrument panel so that it still looks completely stock from the outside. No one would have any idea it's remote control. Only difference is that the steering doesn't tilt anymore, and it can motor off on it's own.
I like to point out complications with my projects since it might prevent others from similar loss of time. So, did this just all bolt together and work? In a word, no.
First issue was removing the steering wheel. It was frozen on so hard that I had to make a special puller to get it off, then it pulled the molded-in metal hub right out of the plastic wheel, then I had to cut that off, and replace the steering wheel. Lots of anti-seize was used this time.
The eHydro control electronics box worked on the first board lay-out, but I redid it to make it more mechanically and electrically robust. This also allows a little faster travel speeds - you know, in case a red tractor needs to be shown the short-road home. Not that I don't have a red tractor too.
The steering mechanical was the biggest issue. I ended up making most of the mounting pieces at least three times before I came up with a solution that worked well. In addition, I had to try a couple different gear ratios for the chain-drive, and even a second stepper motor with a different gear ratio. Issues were strength and flex, speed, clutch torque management, and clearance under the instrument panel.
So, when all done, it looks simple and straight-forward, but it took a few side-trips to get to that point.
Works great though! Hope you enjoyed reading about it.